自动上下料视觉解决方案
极视科技提供自动上下料视觉解决方案服务,面向机器人抓取、上下料、分拣、定位引导和柔性制造产线,覆盖需求评估、方案设计、开发调试、部署验收和后期优化,帮助企业提升视觉检测效率、系统稳定性和数据可追溯能力。
极视科技提供自动上下料视觉解决方案服务,面向机器人抓取、上下料、分拣、定位引导和柔性制造产线,覆盖需求评估、方案设计、开发调试、部署验收和后期优化,帮助企业提升视觉检测效率、系统稳定性和数据可追溯能力。
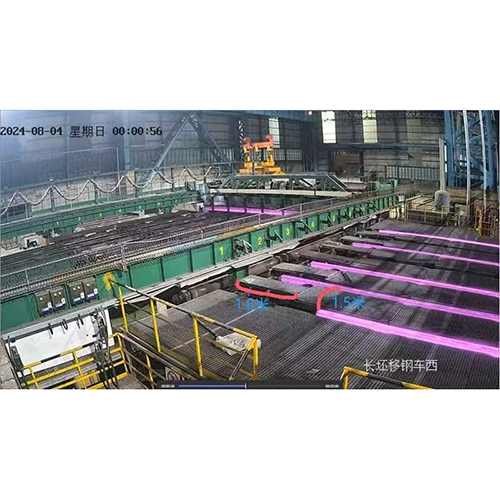
自动上下料视觉解决方案面向机械臂抓取、机床上下料、料盘取放、物流分拣和自动装配现场,重点解决机器人坐标不稳定、抓取点不准确、来料姿态变化大、节拍波动。项目会围绕相机坐标、机器人坐标、工件姿态和节拍稳定性设计,保证视觉结果能真正驱动动作。
自动上下料视觉解决方案需要建立稳定的坐标转换关系,并把视觉识别结果转成机器人可执行的抓取、定位或装配动作。
现场常见问题包括机器人坐标不稳定、抓取点不准确、来料姿态变化大、节拍波动。方案需要把视觉识别、坐标转换、机器人通讯和动作节拍统一调试,避免识别正确但动作无法稳定执行。
典型配置包括相机标定、手眼标定、目标识别、位姿估计、抓取点规划、机器人通讯、节拍优化。实际项目会根据现场空间、节拍、精度、预算和维护方式调整,不强行套用固定硬件或固定软件架构。
该服务适用于机械臂抓取、机床上下料、料盘取放、物流分拣和自动装配现场。项目通常需要结合机器人品牌、末端夹具、工件来料方式和现场节拍一起评估。
交付内容通常包括目标坐标、抓取姿态、标定参数、通讯协议、调试记录、运行日志。同时会提供必要的部署说明、参数配置建议和测试记录,方便后续维护人员理解系统运行逻辑。
为了提升评估准确性,建议提前提供机器人品牌型号、末端执行器、工件样品、抓取节拍、相机安装方式和通讯协议。这些资料越接近真实现场,方案设计和报价就越可靠。