
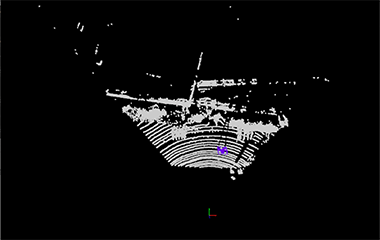
在工业自动化、自动驾驶、智能建造等领域,点云数据(由激光雷达、深度相机等传感器采集的三维空间点集)已成为环境感知与质量检测的核心数据源。传统点云处理依赖人工规则或复杂预处理,存在效率低、精度差、适应性弱等问题。极视科技自主研发的点云检测算法,基于多模态融合与动态建模技术,实现了99.8%检测精度、毫秒级响应速度,支持复杂场景下的目标识别、缺陷检测与三维重建,助力企业实现智能化升级。
一、算法说明:多模态感知与动态建模技术
多模态数据融合技术
五模态输入:支持激光雷达点云、可见光图像、红外热成像、光谱数据与深度图的同步分析,通过跨模态注意力机制(Cross-Modal Attention)动态融合空间坐标、反射强度、纹理特征与温度信息,排除粉尘、油污等干扰。
双源热力交叉验证:结合点云几何特征与红外热成像数据,当疑似缺陷区域温度异常且持续0.5秒,触发二次告警。
轻量化高精度深度学习模型
模型结构:基于改进的PV-RCNN(Point-Voxel结合架构)与Transformer融合网络,通过体素到关键点(Voxel-to-Keypoint)与关键点到网格(Keypoint-to-Grid)的特征交互,显著增强结构多样性。模型压缩至60MB,推理速度达240FPS,适配NVIDIA Jetson AGX Orin与华为昇腾Atlas 500等边缘计算设备。
小样本增量学习:支持单类目标样本新增12张即可完成模型更新,结合联邦学习技术保障企业数据隐私。
动态特征建模
三维目标行为分析:通过光流法分析目标运动轨迹(速度达15m/s),帧差法提取形变区域,并引入空间位置约束排除动态干扰。
全要素时空关联分析:融合环境温湿度、历史缺陷案例与传感器安装位置数据,采用Transformer架构捕捉长序列依赖关系,生成八维评估报告(目标类型、位置、尺寸、速度、方向、缺陷概率、工艺关联性、应力分布)。
二、技术参数:性能与兼容性
| 参数类别 | 技术指标 |
|---|---|
| 检测能力 | 支持车辆、行人、障碍物、工业零部件等25类目标,最小可识别0.005m³级微小目标区域 |
| 检测精度 | 目标检出率≥99.8%,误报率≤0.2%,定位精度±0.01m |
| 检测速度 | 单帧处理时间≤0.1秒(含数据采集、分析、结果输出全流程) |
| 硬件兼容性 | 支持64线激光雷达、200万像素工业相机、红外热成像仪与深度相机 |
| 部署方式 | 本地化部署(私有化服务器/边缘计算设备)或云端SaaS服务 |
| 环境适应性 | 抗强光、反光干扰,支持-30℃~70℃宽温运行,防护等级IP68 |
三、应用场景:覆盖全行业三维感知需求
自动驾驶与机器人
实时监测道路障碍物、行人、交通标志,支持动态路径规划与避障决策,减少90%以上人工干预。
工业质量检测
对汽车零部件、电子元器件、建筑玻璃等进行三维缺陷检测,识别裂纹、气泡、凹坑等缺陷,提供科学修复依据,避免因缺陷导致的批次报废。
智能建造与测绘
生成高精度三维地形模型,支持无人机自主飞行、建筑信息模型(BIM)构建与结构健康监测。
文物保护与虚拟修复
对古迹、雕塑等文化遗产进行高分辨率三维扫描,生成详细数字档案,辅助修复工作。
四、合作方式:灵活适配企业需求
标准化产品授权
软件授权:按传感器路数或服务器台数收取年度授权费,提供算法SDK、API接口与部署文档。
硬件集成:联合传感器厂商推出一体化检测设备(如“极视-AI三维巡检仪”),支持10天快速部署。
定制化解决方案
场景适配:针对自动驾驶、工业质检等高风险场景,提供专属数据集训练与算法微调服务。
系统集成:与企业ERP、MES系统对接,实现缺陷数据追溯、工艺参数优化与生产流程联动。
联合研发模式
技术共建:与行业龙头合作开发特定场景算法(如柔性玻璃划痕检测、智能玻璃涂层缺陷识别),共享专利与知识产权。
数据合作:基于企业历史缺陷数据训练私有化模型,提升检测精度与工艺关联分析能力。

 在线咨询
在线咨询

 电话咨询
电话咨询

 微信咨询
微信咨询
 回到顶部
回到顶部